Darwin op & Nao
In this new post I would like to present two of the most amazing robots I have ever seen. In my opinion biped robots are the most interesting one because the amount of technology necessary to make them move and because they look like human.

1) Darwin op
Based on what Robotis says : DARwIn-OP (Dynamic Anthropomorphic Robot with IntelligenceÔÇôOpen Platform) is an affordable (it depends on your budget) , miniature-humanoid-robot platform with advanced computational power, sophisticated sensors, high payload capacity, and dynamic motion ability to enable many exciting research and education activities.
The really good thing about it is that it is an open platform. This means that you have everything available to make your own robot. Of course there are parts like servos that are really difficult to make on your own.
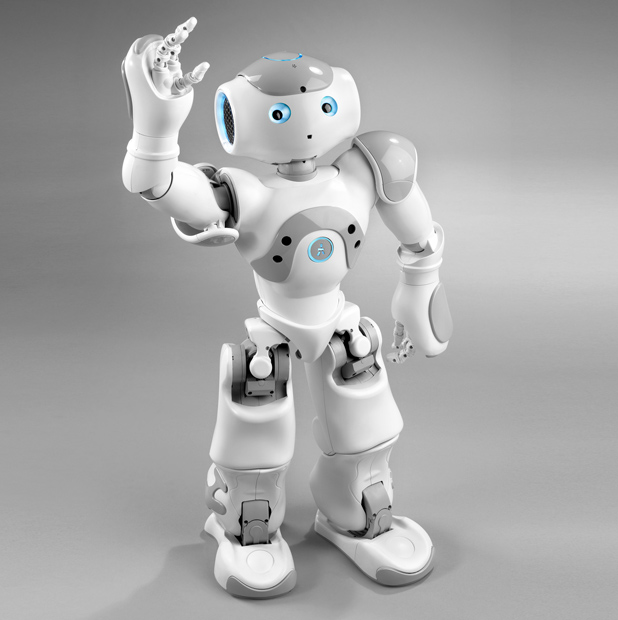
2) Nao
Nao (pronounced now) is an autonomous, programmable humanoid robot developed by Aldebaran Robotics, a French robotics company headquartered in Paris. The robot’s development began with the launch of Project Nao in 2004.
The various versions of the Nao robotics platform feature either 14, 21 or 25 degrees of freedom (DoF). A specialised model with 21 DoF and no actuated hands was created for the Robocup competition. All Nao Academics versions feature an inertial measurement unit with accelerometer, gyrometer and four ultrasonic sensors that provide Nao with stability and positioning within space. The legged versions included eight force-sensing resistors and two bumpers.
The Nao robot also features an onboard Linux-powered multimedia system, including four microphones (for voice recognition and sound localization), two speakers (for text-to-speech synthesis) and two HD cameras (for computer vision, including facial and shape recognition). The robot comes with a software suite that includes a graphical programming tool (“Choregraphe”), simulation software and a software developer’s kit.